Персональные компьютеры и мобильные телефоны, еще недавно являвшиеся редкостью и предметами роскоши, сегодня распространились так широко, что стали остро необходимыми инструментами для финансовых операций, деловых переговоров и повседневного общения. По всей видимости, следующими техническими новинками, которые стремительно ворвутся во все сферы жизни и навсегда изменят ее до неузнаваемости, станут роботы. Лишь несколько десятков лет назад автоматические помощники сделали первые шаги в заводские цеха, но теперь им стало там тесно, и потому сегодня можно услышать про роботов, проводящих уроки и охраняющих правопорядок. У истоков этого «нашествия машин» стоял создатель первого коммерческого электрического робота инженер Бьёрн Вайшбродт, которого часто называют «отцом электрического робота». За почти десять лет службы в фирме ASEA и компании ABB, образованной путем слияния шведской ASEA и швейцарской Brown, Boveri & Cie, он превратил свое детище робота IRB 6 и его семейство в основу для стабильного и перспективного технологического бизнеса.
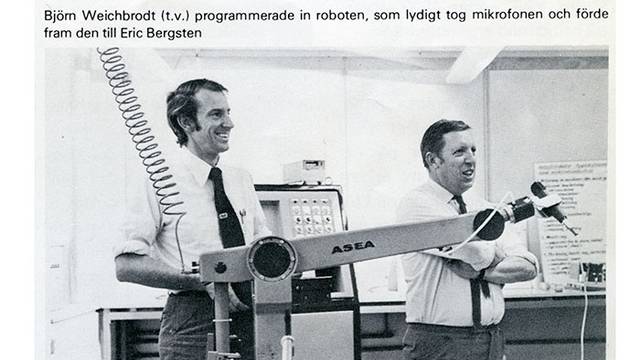
ASEA IRB – это серия промышленных роботов для обработки материалов, упаковки, транспортировки, полировки, сварки и сортировки. Построенный в 1975 году, робот IRB мог перемещаться по пяти осям и обладал грузоподъемностью 6 кг. Это был первый в мире полностью электроприводный и управляемый микропроцессором робот, использовавший первый набор микросхем компании Intel. ASEA IRB был построен Бьёрном Вайшбродтом, Ове Кулборгом, Бенгтом Нильссоном, Гербертом Кауфманом и выпущен фирмой ASEA в шведском городе Вестерос. Первая модель, - IRB 6, - была разработана в 1972-1973 годах по поручению генерального директора ASEA Курта Николина и впервые показана в конце августа 1973 года. Образец, выставленный в Шведском национальном музее науки и техники, является первым проданным роботом IRB. Его приобрела компания Magnussons i Genarp AB для полировки изогнутых под прямым углом трубок из нержавеющей стали. Этот робот был подарен музею во время 100-летнего юбилея компании ASEA в 1983 году. IRB 6 удалось продать в количестве 1900 экземпляров в течение следующих семнадцати лет с 1975 по 1992 годы, и он стал шведским символом нового рынка труда, разделяемого между человеком и роботом. Инженер Бьёрн Вайшбродт, руководивший коллективом разработчиков IRB6, скончался 12 октября 2013 года в Стокгольме в возрасте 76 лет.
 Самый копируемый робот в мире
Самый копируемый робот в мире
Не исключено, что скоро вообще все без исключения монотонные трудовые операции лягут на плечи автоматических помощников, которые станут послушно выполнять заложенные в них программы, не делая перерывов на обед и сон, не теряя времени на дорогу до работы и домой. Они будут трудиться круглосуточно и без выходных, нуждаясь только в электропитании и техническом обслуживании, которое благодаря дальнейшему прогрессу науки и техники придется проводить все реже и реже. В своей посвященной памяти Вайшбродта статье Дэвид Маршалл, возглавлявший в 2013 году отдел торговых коммуникаций в структуре ABB Robotics, заметил, что, хотя таким инженерам, как Джорджу Деволу и Джозефу Энгельбергеру обычно воздается основная доля почестей за изобретение промышленного робота, в его представлении Бьёрн является настоящим отцом нынешнего поколения электрических роботов. В декабре 1971 года Вайшбродт начал работать в департаменте гидравлики компании ASEA, и ему было поручено возглавить команду создателей робота. В ту пору у его подчиненных не было никаких сомнений в том, что они займутся постройкой именно гидравлического робота. Однако Бьёрн работал над двумя параллельными конструкциями сразу – гидравлической и электрической. Старшее руководство компании ASEA решило, что идея инвестировать в электрических роботов была неплохой для компании, работавшей в электротехнической отрасли. Таким образом, в июне 1972 года Бьёрн и его команда из 18 специально подобранных инженеров начала трудиться над созданием прототипа.
Одним из первых их решений было построить систему управления на основе нового микропроцессора 8008, выпущенного почти неизвестной тогда компанией Intel, и команде Вайшбродта удалось приобрести самый первый чип этой серии. Прототип содержал и несколько других прорывных технических новшеств, в том числе антропоморфный манипулятор, полностью электрические системы приводов и управления. Первая модель была представлена совету директоров ASEA в феврале 1973 года, где его председатель Маркус Валленберг принял решение продолжить разработку. Первый публичный показ нового робота состоялся в гостинице Foresta в Стокгольме в октябре 1973 года. Трудно представить сегодня, насколько революционным по количеству новых конструкторских решений оказался тот первый IRB 6, однако скоро он стал самым копируемым роботом в мире и создал идейную основу, на которой были построены все современные промышленные роботы. В 2013 году в обрабатывающей промышленности всего мира трудилось почти полтора миллиона роботов, и все до одного они своим существованием были обязаны Бьёрну и его оригинальному проекту, вызывавшему у Маршалла нескрываемое восхищение. Позже Бьёрн стал исполнительным директором подразделения ASEA Robotics и занимал эту должность с 1974 до 1986 года. Под его управлением компания, сегодня носящая название ABB Robotics, выросла в своей отрасли до уровня мирового лидера. «Покойся с миром, Бьёрн. Я всегда буду считать тебя «отцом электрического робота»», - подвел итог своим воспоминаниям о нем Маршалл.
 Приход компании ASEA в робототехнику
Приход компании ASEA в робототехнику
Историю первого электрического промышленного робота руководитель проекта по его созданию Бьёрн Вайшбродт некоторое время тому назад подробно рассказал собеседнику Яну Джонсону, сегодня занимающему должность менеджера по всемирному обучению в фирме ABB Robotics. Эта беседа проходила в непосредственной близости от IRB6 и содержащего оборудование для управления им массивного шкафа-контроллера. Джонсон заметил, что благодаря первым предприимчивым деятелям робототехнической отрасли компания ABB вышла на ведущие позиции в сфере развития промышленных роботов и увеличения их численности во всем мире. Например, именно благодаря ABB дуговая сварка стала одной из самых распространенных технологий. «У нас есть так много причин, чтобы испытывать гордость по поводу истории роботов ABB». Своего первого электрического робота фирма ASEA продала в 1974 году. «Бьёрн, расскажите нам, как это все началось, как это выглядело, когда вы вошли в мир робототехники?» Вайшбродт ответил, что его карьерный путь свернул в этом направлении в 1971 году. Далее он уточнил, что первый в мире коммерческий робот был создан Джозефом Энгельбергером в компании Unimation в США в конце 1950-х годов. Это была довольно большая гидравлическая машина, предназначавшаяся для автоматизации производственных процессов. Насколько помнил Бьёрн, первая возложенная на нее задача заключалась в том, чтобы трудиться в связке со шлифовальным станком. Робот Энгельбергера был довольно крупным устройством, которое можно было программировать в режиме движения от точки к точке. «И мне кажется, что тогда, когда я начал, в мире было около трех тысяч роботов, о существовании которых мы знали».
Далее Джонсон поинтересовался, как складывалась рыночная обстановка вокруг промышленных роботов, когда ABB, - в прошлом ASEA, - вышла на сцену. «Итак, Бьёрн, какова была главная причина вовлечения компании ASEA в этот бизнес?» Вайшбродт ответил, что, по его мнению, Курт Николин, занимавший пост президента этой компании в 1960-х и 1970-х годах, видел в предоставлявшихся робототехникой возможностях потенциал для будущего бизнеса. Николин был технологом, что подтолкнуло его к принятию решения, призванного проверить, можно ли было начать в компании бизнес по выпуску роботов. Джонсон спросил, имелись ли для открытия этого направления и какие-либо другие причины. Вайшбродт рассказал, что в то время, в 1960-е годы, станки с числовым программным управлением стали общедоступным продуктом, и это приводило к тому, что «наши заводы становились очень эффективными в каждой отдельной станочной операции». Однако, когда некоторое количество станков объединяли для проведения производственного процесса, перенос между ними обрабатываемых деталей делал их изготовление довольно долгим, и решить эту проблему мог промышленный робот. Механический помощник, выпущенный компанией Unimation, справлялся с данной задачей, - правда, этот гидравлический робот был очень большим, довольно неповоротливым и шумным, ему требовалось очень много электроэнергии, и это было не очень безвредное с точки зрения отходов устройство. Таким образом, он обладал множеством недостатков, которые объяснялись наличием в его конструкции гидравлических приводов. «Мы понимали это, и нам не очень нравились такие роботы, однако они могли трудиться на наших производственных линиях».
 Курт Николин (в центре) и Маркус Валленберг (справа)
Для решения производственной задачи собрали коллектив профильных специалистов
Курт Николин (в центре) и Маркус Валленберг (справа)
Для решения производственной задачи собрали коллектив профильных специалистов
Дальнейший диалог Яна Джонсона и Бьёрна Вайшбродта в общих чертах проходил следующим образом.
- Имела ли в то время ASEA подходящие условия, чтобы создать своего собственного робота?
- Я думаю, да, для этого имелись все возможности, и вы должны понимать, что ASEA уже была крупной компанией в области разработки электрических систем. Поэтому у нас для этого были очень хорошие ресурсы. У нас также были очень хорошие возможности для проектирования механизмов, создания портативного робота, накопился очень большой опыт в разработке программного обеспечения, и четвертой составляющей, которая очень важна, было то, что мы овладели искусством управления механическими цехами, благодаря чему имели представление о том, как именно будут применяться роботы. Поэтому мы имели очень хороший задел для выхода на рынок.
- Бьёрн, как и когда вы вошли в эту отрасль?
- Это началось в конце 1971 года, когда я работал не в ASEA, а в компании General Electric в Соединенных Штатах, куда переехал на 6-7 лет раньше. Я отвечал за группу разработчиков, создававшую автоматику, очень интересовался робототехникой, и события стали развиваться таким образом, что я побывал в компании ASEA, чтобы познакомиться с ее деятельностью. Я интересовался Швецией, мы начали говорить о робототехнике, в результате Курт Николин предложил мне заняться созданием новой робототехнической системы, и я согласился. Вот как я оказался в ASEA.
- Можете ли вы описать, как этот проект был запущен, и когда именно это случилось?
- В апреле 1972 года мы приняли формальное решение начать разработку программы по выпуску роботов. Тогда же я начал понимать, что нам была нужна проектная группа, которая будет так называемой «полной командой». Она должна была заниматься не только проектированием или системами механики, электрики, программным обеспечением, но также разрабатывать технологию производства и думать о том, какими будут применения нового продукта и как он будет выводиться на рынок. Лично я одобрил такую тактику, мы получили согласие на воплощение этого плана, и нам разрешили собрать вместе двадцать человек, которых мы привлекли из разных отделов компании. Они представляли все необходимые специальности, и у нас было очень сильное желание создать первого робота, существующего физически, которого можно было бы демонстрировать в период с апреля 1972 года до февраля 1973 года. Маркус Валленберг, занимавший очень высокий пост в нашей компании, решил, что это будет подходящим временем, чтобы показывать робота акционерам, и мы взялись за дело.
 Маркус Валленберг
Отказ от гидравлики в пользу электричества
Маркус Валленберг
Отказ от гидравлики в пользу электричества
- Я бы очень хотел побольше узнать о ваших конструкторских принципах и как вы выбирали концепцию, поэтому давайте обсудим манипулятор. Все роботы в то время были гидравлического или пневматического типа, поэтому как так получилось, что вы не выбрали ни одну из существовавших технологий?
- Доступные в то время конструкции были гидравлическими и потому обладали всеми теми недостатками, о которых мы уже говорили. Вдобавок к этому имелись все основания, чтобы испытать электрические системы с приводом постоянного тока или шаговым двигателем. Чтобы направить производство по единственно верному пути, я размышлял над тем, какой сфере принадлежало будущее, и ощущал, что, если вы собирались управлять проектом, развивать новую систему для компании ASEA, - большого специалиста в области электрических и некоторых компьютерных систем, - то гидравлика представляла собой боковую ветвь технического прогресса. Продолжая разработку, мы пробовали идти в разных направлениях, для чего испытывали гидравлические, пневматические и электрические устройства, однако я постоянно держал в уме идею остановиться на электрической конструкции.
- Каковы были основные альтернативы для приведения механизмов в действие?
- У нас было два типа механизмов, способных хорошо работать. Первой идеей был шаговый двигатель. Это такой мотор, который делает шаг в ответ на каждый получаемый импульс. Увы, он не имеет системы обратной связи, поэтому вы не можете быть абсолютно уверены в том, что робот находится в правильном положении, к тому же этот мотор надо наделять большим дополнительным запасом мощности. Поэтому он нам не очень понравился после испытаний, и мы выбрали привод с двигателем постоянного тока (DC). Мы чувствовали, что это решение должно было обеспечить бесшумную работу. К тому же ASEA наладила выпуск надежных DC-двигателей, благодаря чему мы могли обеспечить очень высокую точность движений и низкий уровень шума, а также получали целый ряд преимуществ, позволявших создать робота, который будет не только обрабатывать материалы, но и применяться в технологических приложениях. Вот почему мы выбрали привод постоянного тока.
 Курт Николин
История IRB6, - первого робота компании ABB
Курт Николин
История IRB6, - первого робота компании ABB
- При выборе концепции нужно было также определиться с системой координат. Цилиндрический и полярный типы роботов уже существовали. Не могли бы вы подробно рассказать, какими были ваши мысли на этот счет?
- Да, конечно, могу, потому что в то время это был важный вопрос. Имелось много методов постройки механического робота, и нужно внести ясность, почему было решено строить его именно этим способом. Выбрав, например, полярный тип, пришлось бы использовать телескопическую руку, которая должна раздвигаться в длину, и это могло привести к возникновению неточностей в движениях. Выбрав цилиндрический тип, вы бы получили руку, которая движется вверх и вниз, и тогда, если бы возникла необходимость переместить деталь небольшого веса, такая механическая рука оказалась бы для этого слишком большой. – После этих слов Вайшбродт взялся за стоявший рядом манипулятор первого робота компании ASEA и начал описывать его преимущества. - Это было очень компактным решением, мы называем его антропоморфным, что означает «подобный человеку», и если вы видите такой тип конструкции и сравниваете его с моей рукой, то она имеет в основном такую же геометрию. Она очень легкая, она очень стабильная, она точная, она не допускает скользящих движений, и ее конструкция позволяет разместить некоторые механизмы внутри «руки», что позволяет очень хорошо их защитить. Поэтому она нам очень понравилась, и мы выбрали ее, а другие версии были разработаны позже, но в основном в соответствии с этим принципом.
- Как насчет проблем с трансмиссией для разных осей?
- Давайте поговорим об этом, и как раз у нас под рукой есть робот, поэтому мы можем вам все показать. Вот три наших гармонических привода, это главный, очень компактный, - показал Вайшбродт на круглый выступ в основании робота, - это разновидность трансмиссии, которая может иметь очень большой обменный коэффициент, и на самом деле единственное решение, которое мы могли найти для некоторых из осей. На главных осях манипулятора мы использовали губчатые винты. Это решение дает очень хорошие возможности для предотвращения люфта и обеспечивает достаточно стабильное движение. Однако эти конструкционные особенности не устраняют все проблемы, пока мы не дополняем их нашим собственным изобретением. Нам удалось придумать и запатентовать параллельную связующую систему, которую я покажу вам, поворачивая робота, - и он повернул IRB6 почти на 180 градусов. - Там применяется не цепная передача и не какого-либо типа ремень, а система связи в виде стальных стержней, немного напоминающая крепление прямого угла на кульмане. На чертеже видно, как она обеспечивает связь установленного снизу мотора через колено дальше на цапфу. Это двуосная цапфа, а трехосная тогда еще не поступила даже в первоначальную разработку. Но все эти передающие движения механизмы были в то время вполне современными, и они до сих пор прекрасно работают. Имея очень долгий срок службы, они очень надежны и не требуют постоянного ухода. Поэтому мы считаем, что это было хорошее решение, причем оно остается таковым [ даже спустя примерно сорок лет ].
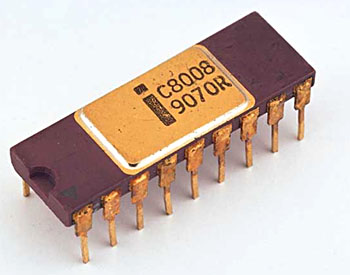 Процессор Intel 8008
История контроллера S1
Процессор Intel 8008
История контроллера S1
- Теперь мы знаем ваши критерии и решения, применявшиеся при создании манипулятора. Давайте перейдем к контроллеру. Какой была технология его постройки в то время?
- Вот что было нашим контроллером – показал Вайшбродт на громоздкий приборный шкаф, верхняя часть которого оснащена круглыми и квадратными кнопками. – В нем использовалось много новых изобретений, о которых я расскажу позже. Но если вы посмотрите на то, что было доступно на рынке, то, как я считаю, у нас было два решения, которые вы могли сравнить и оценить их перспективы. Первым было решение фирмы Unimation, - там был контроллер, который мог направлять движения робота между последовательно расположенными точками. Это в точности совпадает с тем, как вы бы запрограммировали посудомоечную машину. Вы бы провели ее через ряд установленных заранее шагов, и таким же образом вы могли программировать определенные позиции робота, но при этом не было возможности программировать варианты прохождения траектории между этими точками. И, хотя робот мог перемещаться между двумя положениями в пространстве по разным путям, в вашем распоряжении были только те точки, которые вы вносили в программу. Это создавало неудобные ограничения для роботов, спроектированных для обработки материалов, к тому же наши замыслы простирались намного дальше тех границ, которые очерчивал такой подход. Вторым использованным в данном случае решением был метод компании из соседней с нами страны. Это была фирма Trallfa из Норвегии, которая применила данное решение для программирования красящих роботов. Это был совершенно другой подход. У них был робот, который двигался по методу учителя, - заметил Вайшбродт, скорее всего, имея в виду перемещения учителя с мелом в руке вдоль классной доски. - Это был уравновешенный гидравлический робот, которому задавалась необходимая траектория распыления краски. Вы передавали ему этот алгоритм через обычный магнитофон, который имелся в шкафу-контроллере и оснащался специальной ленточной петлей. Таким образом, можно было задать весь путь распылителя, но вы никак не могли изменить этот путь, не переписав всю программу, что лишало такое решение малейшей гибкости. И нам на самом деле не нравилось ни одно из этих решений, поэтому нужно было создать контроллер третьего типа.
- Исходя из слабых мест этих двух типов вы решили сделать совершенно новый контроллер. Бьёрн, не могли бы вы рассказать об этом побольше?
- Конечно, вот, - обвел он рукой шкаф, - новый контроллер, который не очень отличается снаружи от прочих, как и внутри, однако имеет специфическую совершенно новую особенность. Нам очень повезло с этой разработкой благодаря тому, что появилась возможность впервые использовать микропроцессорную базу. Ранее у нас не было доступа к такой технологии, но, когда мы вели разработку, компания Intel в США выпустила восьмибитный микропроцессор марки 8008. Изучив его возможности, мы решили, что он позволял построить систему управления, основанную на компьютере, умевшую контролировать путь робота и дававшую возможность вводить данные через сенсор. Поэтому мы решили попробовать такой вариант, в результате чего в этом шкафу появился миниатюрный микропроцессор, за которым, честно говоря, я сам съездил в США в конце осени 1972 года, где и получил его в компании Intel в Калифорнии. Таким образом, еще раз замечу, нам очень повезло найти эту новую технологию прямо «у нашего порога» примерно в то время, когда она нам была нужна, и потом этот метод получил очень широкое распространение среди конструкторов, создававших новые поколения роботов.
 Как программировали IRB6
Как программировали IRB6
- Давайте теперь поговорим о программировании нового электроприводного робота, в котором функцию контроллера выполняет микропроцессор. Что вы могли сделать с этим роботом?
- В то время мы понимали, что были в выгодном положении, поэтому на самом деле много чего могли сделать, особенно по сравнению с конкурентами, так как в нашем распоряжении было 16 способов ввода разных данных, мы могли программировать скорости движения робота и расположение точек его траектории, также мы могли контролировать его скорость и путь между точками. И это позволило нам начать разрабатывать первые программы для дуговой сварки и операций склеивания. Нельзя назвать эти успехи грандиозными, однако они давали очень заметные преимущества перед имевшимися у нас соперниками. И конечно, что не менее важно, мы имели точку опоры для дальнейшего развития, так как теперь в нашем контроллере использовалась компьютерная технология.
- Эти результаты кажутся очень скромными по сравнению с современными возможностями высоких технологий, но мы должны помнить, что в то время благодаря вам и новаторскому мышлению ваших коллег компания ASEA смогла ощутимо укрепить всю эту отрасль, чтобы нарастить использование промышленных роботов в совершенно новых областях, - таких, как дуговая сварка, склеивание и шлифование, - которые, как мы знаем, являются для человека опасными операциями. До появления ваших проектов роботы двигались не очень точно, и им не хватало контроля за прохождением пути. Каждый сотрудник компании ABB может гордиться вашими достижениями, а также нашим общим вкладом в роботостроительную промышленность и распространение роботов по всему миру. Спасибо вам большое, Бьёрн, - отец электрического робота!
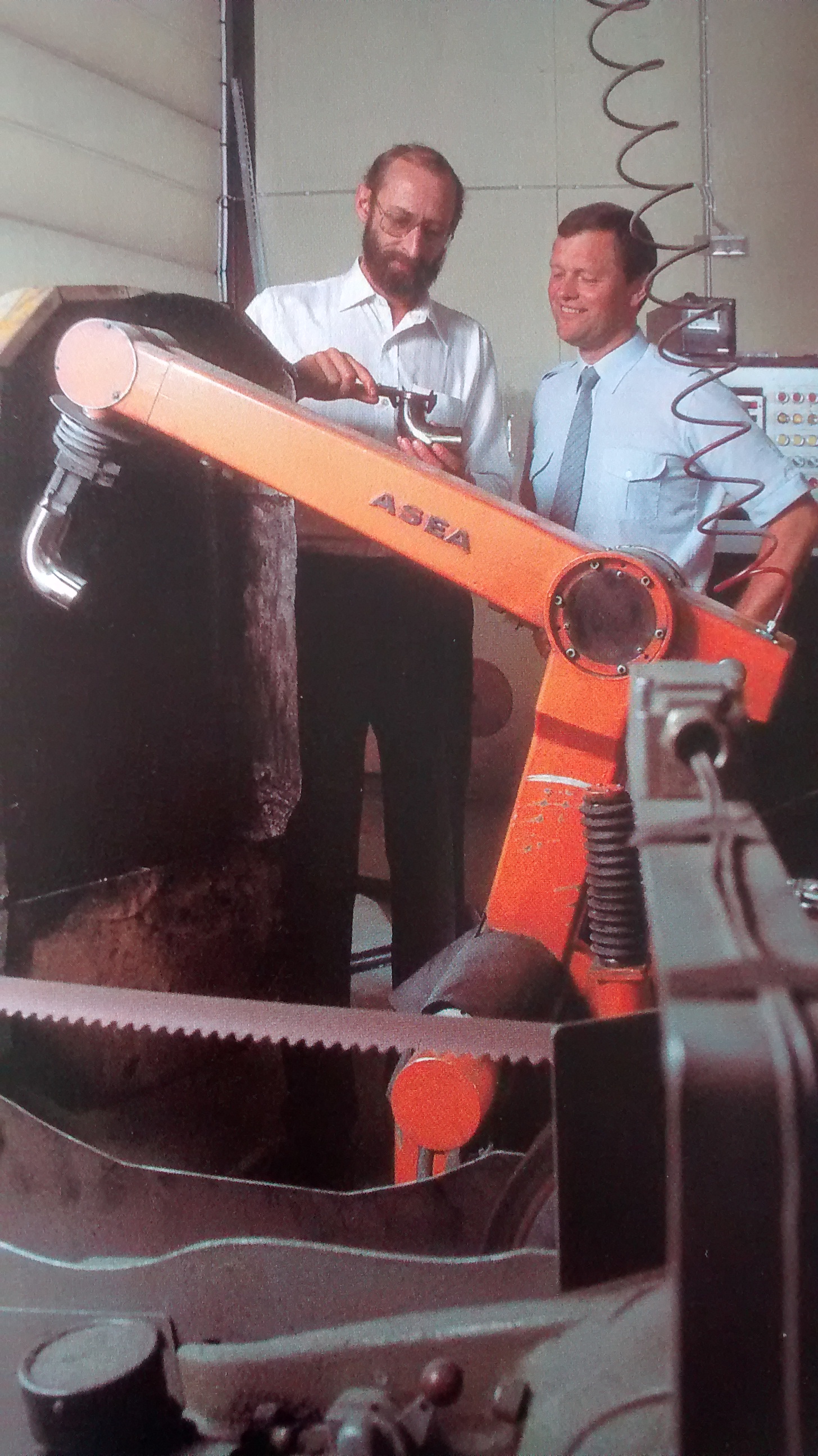 Льеф Йонссон и Леннарт Бендз
Первого робота продали на выставке
Льеф Йонссон и Леннарт Бендз
Первого робота продали на выставке
Леннарт Бендз, трудившийся в отделе сбыта компаний ASEA и ABB, поделился своими воспоминаниями о том, как на его глазах много лет назад зарождалась история электроприводных промышленных роботов. Первым покупателем робота ASEA была компания Magnussons i Genarp AB. Ее директор Льеф Йонссон, «очень умный человек», занимался довольно специфическим производством. А именно, - изгибал трубки из нержавеющей стали, при этом не создавая усталости металла в месте сгиба. О методе его работы в свое время в прессе вышла статья под названием «Не сваривайте, а сгибайте». Льеф увидел первого робота IRB6 во время его первого показа, состоявшегося на выставке в Стокгольме в 1973 году. Он сразу же понял, что мог применить эту машину на своем производстве. Знакомство с роботом закончилось тем, что Льеф Йонссон заявил: «Я его забираю». Это, конечно, стало шоком для представителей ASEA, показывавших робота публике. У них не было на него никаких расценок, и «они не знали, что с ним делать», - сотрудники выставки понимали только, что это была хорошая машина. Поэтому они хотели, чтобы Льеф заплатил за нее столько, сколько она стоила. После согласования цены сделка состоялась, и робот был доставлен в цех компании Magnussons i Genarp. Так эта фирма стала первым покупателем промышленного робота ASEA. Немного позже, в 1975 году, Йонссон стал одним из первых в мире руководителей полностью «безлюдной», то есть на сто процентов автоматизированной фабрики, работавшей круглосуточно семь дней в неделю.
- У нас в компании есть четыре робота, и все они находятся в эксплуатации, - рассказал Мэтс Йонссон, работавший в Magnussons i Genarp оператором. – Их нужно снабдить согнутыми трубками, которые роботы потом шлифуют и очищают.
После того, как Мэтс запускает производственную линию, робот IRB6 поворачивается к штабелю из трубок, вынимает из него манипулятором самую нижнюю, после чего подносит ее к шлифовальному станку с бегущим ремнем и прижимает к нему, одновременно поворачивая трубку в разных направлениях. Затем он подносит ее к станку с двумя чистящими дисками и прислоняет к ним поочередно. Закончив эту операцию, робот подносит трубку к ящику для готовой продукции, отпускает, и, упав на установленную там наклонную плоскость, она скатывается на дно. По словам Мэтса, когда роботов привезли на фабрику, сотрудники отнеслись к этому скептически и боялись потерять свои рабочие места. Но управляющий директор Льеф Йонссон считал роботов воплощением нового подхода к производству и хорошим приобретением для компании, позволявшим выпускать и продавать больше продукции и зарабатывать больше денег.
- У нас был парень в Мальмё, который помог ему установить соединение с выключателями периферийного оборудования. И все заработало. Они сделали необходимые настройки и придумали принцип карусели, благодаря которому роботы могли трудиться круглосуточно. [ Сотрудникам Magnussons ] оставалось только загрузить карусель [ заготовками ], после чего они могли заняться другими делами. Это было совершенно уникально! – вспоминает Бендз.
- Что касается ремонта и обслуживания, то они требуются в основном периферийному оборудованию, - такому, как шлифовальные ремни и щетки для обработки поверхности, которые надо заменять, - продолжил свой рассказ Мэтс. – Ремень меняется раз в день, а нейлоновые диски, - примерно раз в четыре дня. За последние четыре-пять лет у нас было всего три остановки на все четыре робота, вместе взятые… [ Робот ] сам о себе заботится, - объяснил оператор.
На этих четырех роботов были возложены все производственные операции, и обработанные ими согнутые трубки компания Magnussons с большим успехом продавала по всему миру, - вспоминает Бендз. Тот факт, что эти роботы были в эксплуатации так долго, «причем каждый из них», да еще и в круглосуточном режиме, является «не имеющим себе равных живым доказательством фантастического качества наших роботов», - подвел он итог. Компания ABB выразила благодарность шведской фирме Magnussons i Genarp за сохранение ее самых первых роботов в полном рабочем состоянии на протяжении более, чем 36 лет эксплуатации.
 Мэтс Йонссон
Многочисленные поглощения привели к появлению европейского электротехнического гиганта ABB
Мэтс Йонссон
Многочисленные поглощения привели к появлению европейского электротехнического гиганта ABB
Компания ASEA, в которой создавал своих роботов инженер Вайшбродт, сегодня носит название ABB, сохранив в его первой букве свое прежнее наименование в сокращенном виде. ASEA AB, которую называют «промышленной жемчужиной Швеции», была создана в 1883 году. Бизнес компании ASEA в то время в общих чертах определялся как производство и применение электрической энергии. Фирма выпускала такие разнообразные изделия, как паровые турбины для электростанций и высокоскоростные электровозы. В 1978 году ASEA произвела одного из первых в мире промышленных роботов. В 1986 году в ASEA работала 71 тысяча человек, и ее доходы составляли 6,8 миллиардов долларов. В 1986 году ASEA объявила об успешной реализации своей Скандинавской стратегии, заключавшейся в расширении инженерных и производственных операций фирмы за пределы Швеции ради получения экономического эффекта за счет увеличения масштаба деятельности как в производстве, так и в привлечении капитала. Большим шагом вперед стало приобретение в Финляндии фирмы Strömberg AB, в которой работало 7000 человек, затем в конце 1987 года последовало приобретение 63 процентов EB Corporation в Норвегии. К 1987 году ASEA была радикально реформирована из компании, деятельность которой сосредотачивалась на Швеции, в панскандинавскую электрическую международную компанию. Однако амбиции этой фирмы простирались уже далеко за пределы Скандинавских стран.
В 1987 году шведская ASEA и швейцарская группа электротехнических компаний Brown, Boveri & Cie были примерно одинаковыми по объему годовых продаж, чистой стоимости и количеству сотрудников. Неудивительно, что возникла идея объединить две фирмы «в равном браке» в одну компанию и тем самым укрепить их позиции в конкурентной борьбе на переднем крае технологий. В 1988 году две самые известные в истории европейской электротехники компании ASEA и BBC объединяются для создания группы ABB Asea Brown Boveri со штаб-квартирой в швейцарском городе Цюрихе. Новая компания ABB, которая начала свою деятельность 5 января 1988 года, имела доход размером 17 миллиардов долларов, и число ее сотрудников по всему миру составляло 160 тысяч человек. Появившаяся в результате слияния фирма стала ведущим мировым поставщиком для электроэнергетической промышленности, емкость рынка которой составляет 50 миллиардов долларов. В то время ABB контролировала треть европейского бизнеса и более 20 процентов мирового рынка. После того, как она поглотила 850 компаний, в ней насчитывалось уже 180 тысяч сотрудников, работавших в 140 странах.
 Для сборки смартфонов понадобились совершенно новые роботы
Для сборки смартфонов понадобились совершенно новые роботы
В 2006 году в области связи началась так называемая «революция смартфонов». Мало кто мог тогда более-менее правдоподобно оценить перспективы этого совершенно нового рынка, выводившего обычный мобильный телефон на новый уровень потребительских качеств и функциональных возможностей. Однако уже не было секретом, что в будущем появится взрывной спрос на дешевую и миниатюрную мобильную электронику, поэтому примерно десять лет назад компания ABB начала пересматривать свой подход к робототехнике и автоматизации. При этом особое внимание уделялось замене путаных и сложных производственных линий гибкими и подвижными системами. Спустя некоторое время эта тенденция была названа четвертой промышленной революцией, для ее обозначения также употреблялся термин «интегрированная индустрия». Эти новые веяния принесли понимание того факта, что киберфизические системы, производственные сценарии и плодотворное сотрудничество человека с машиной являются ключами к успешному управлению вырастающей из очередной технической революции экосистемой людей, вещей и услуг. Появление «всемогущих» смартфонов и расширенные ими горизонты мобильного сервиса открыли на рынке возможности, которые, по словам сотрудников ABB, превзошли их самые смелые ожидания. Этот рынок оказался намного сложней, чем они себе представляли, и потребовал создания невероятно широкой инфраструктуры для ручной сборки. В итоге миллионы рабочих на тысячах сборочных линий начали соединять компоненты электронных устройств, фактически подчинивших себе все стороны повседневной жизни. Производственные проблемы, порожденные взрывным ростом спроса на электронику и ее довольно коротким жизненным циклом, усугубились возраставшим запросом рабочих на повышенную зарплату, благодаря чему компания ABB поняла, что сложившаяся система выпуска электроники стала неустойчивой и нерасширяемой.
В 2006 году, когда компания только начала разработку проектов, способных устранить эти проблемы заводских линий, на которых шла сборка товаров из малоразмерных деталей, она еще не знала, насколько большой будет необходимость в таких технических решениях. При этом ABB понимала, что эти линии ручной сборки должны быть автоматизированы, что на это уйдут десятилетия, и что это нужно сделать, не нарушив работу сложной и широкой производственной инфраструктуры. Таким образом, какое бы решение ни разработала фирма, оно должно было основываться на возможностях робототехники, применяться в непосредственной близости от людей и безвредно для них. Позже данная концепция была названа сотрудничеством человека с роботом. Фирма также понимала, что созданный для этого механический помощник должен легко подстраиваться под постоянно меняющиеся производственные задачи, которые обычно обновляются раз в несколько месяцев или даже чаще. Ко всему прочему новое решение должно было быть легко транспортируемым и повторно развертываемым, а также способным встраиваться в существующие рабочие пространства, созданные для людей. Наконец, в нем следовало применять инновационные методы программирования, чтобы автоматика была интуитивной в использовании и любой человек смог обращаться с ней без специальной подготовки. Однако, прежде всего, механический сборщик должен был быть достаточно безопасным, чтобы иметь возможность трудиться бок о бок с людьми без необходимости окружать его решеткой безопасности. Этот подход привел к появлению робота модели IRB 14000 YuMi. В его названии можно увидеть обыгрывание английского словосочетания «you and me» (ты и я). Созданием Юми ознаменовалось начало новой эры так называемых «роботов-коллег». YuMi появился в результате многолетних исследований и проектирования, сделавших сотрудничество людей и роботов реальностью. Для Юми ABB разработала две согласованно действующих сгибающихся руки, систему подачи деталей и их установки под управлением камеры, а также современную систему контроля. YuMi важен не только своей способностью легко встроиться в налаженный производственный процесс, но и заметным влиянием на дальнейшее развитие идей по поводу автоматизации сборки. YuMi был официально представлен публике на Ганноверской промышленной выставке-ярмарке 13 апреля 2015 года.
 Проворный помощник и послушный исполнитель IRB 14000 YuMi
Проворный помощник и послушный исполнитель IRB 14000 YuMi
Двуручные роботы компании ABB имеют точное зрение, цепкие захваты, чувствительную обратную связь с контролем силы, гибкое программное обеспечение и встроенные функции безопасности. Таким образом, ABB создала принципиально новый метод взаимодействия людей и роботов, позволяющий им работать вместе, и Юми стал первым в мире роботом, способным сотрудничать с человеком. Точность действий YuMi такова, что он может вдеть нитку в иголку. Он безопасен для находящегося рядом человека, так как манипуляторы покрыты мягкими материалами и их движения блокируются, если они прикасаются к людским рукам. Интуитивное самообучение этого робота избавляет от необходимости писать для него сложную программу управления, что помогает снизить производственные затраты. Программирование робота поведением позволяет учить YuMi, просто направляя его движения физически. Юми весит 38 кг, имеет небольшие габариты, быстро и легко устанавливается на производственной линии. Как и все новые роботы ABB, YuMi можно подключить к стремительно расширяющемуся сегодня промышленному Интернету вещей.
«Мы видели формирующийся рынок сотовых телефонов, переходящих в смартфоны, - вспоминает Фил Кроутэр, управляющий выпуском малых роботов в ABB Robotics. – И так мы увидели, как появлялся рынок смартфонов, причем довольно быстро. Глядя на производственные линии по выпуску смартфонов, мы обнаружили там множество собирающих их вручную людей. Что это значит для робототехники?» Для его подразделения это значило, что оно должно было разработать продукт, применимый для данных производственных нужд. Оказалось, что просто воспроизвести людские движения не так и легко. «Но что мы попробовали сделать в этом проекте, так это воспроизвести людские ощущения. Нужно было воссоздать те навыки, которыми обладает конвейерный сборщик». Юми получился проворным, так как скорость его движений достигает 1500 миллиметров в секунду. Он имеет присоску на манипуляторе и вмонтированную в его запястье камеру. У этого робота есть множество вариантов подключения, а все его кабели проложены под корпусом, благодаря чему они не висят снаружи, как у других промышленных моделей. «Мы обеспечиваем ускоренное производство с повышенными качеством и гибкостью. От этого решения выигрывает не только производитель, но в конечном итоге и покупатель, который получает более качественный продукт по лучшей цене и с меньшим вредом для окружающей среды. Юми – это завтрашний день безопасной автоматизированной сборки», - подвел итог Кроутэр.
 Тенор Андреа Бочелли и дирижер модели IRB 14000 YuMi
Разум машины не склонен к порывам
Тенор Андреа Бочелли и дирижер модели IRB 14000 YuMi
Разум машины не склонен к порывам
YuMi, первый в мире по-настоящему совместимый с человеком двуручный робот, дебютировал в опере, дирижируя филармоническим оркестром Lucca в Театре Верди, расположенном в итальянском городе Пизе. Среди гостей представления был директор ABB Ульрих Списшофер, под чьим руководством и разрабатывался YuMi. Этот необычный эксперимент показал, что может случиться, когда продвинутая автоматика погружается в мир искусства.
- Сегодня вечером мы пишем историю и перемещаемся в будущее робототехники. Сегодня мы покажем, какой интуитивной и самообучаемой является эта машина, как легко наше программное обеспечение осваивает движения дирижера, как тонко оно чувствует музыку и как умеет управлять целым оркестром. Этот опыт также показывает, как быстро может быть развернута такая технология на месте ее применения. Одной из наибольших проблем автоматизации является не создание физического оборудования, а попытка объяснить роботу, что ему делать. Сегодня впервые в истории робот научился дирижировать оркестром всего за пару дней, - рассказал в кулуарах театра Списшофер.
- Гибкость рук Юми совершенно немыслима – даже не потрясающа, а немыслима для машины, - поделился своими впечатлениями директор Театра Верди Андреа Коломбини. - Она абсолютно фантастическая. Она очень пригодится, потому что в нынешних условиях, когда дирижер может быть сегодня в Нью-Йорке, завтра - в Лондоне, послезавтра – в Париже или где-то еще, то есть он никогда не может быть постоянно вместе с оркестром, вы увидите, что жесты Юми – это другой уровень,… это нечто намного более очевидное, нечто более артистичное, и в их основе лежит гибкость машины – абсолютно фантастично! – выразил он свой восторг. Надо заметить, что Юми действительно немного удивлял, дирижируя не только длинной палочкой, зажатой схватом правого манипулятора, но и второй рукой, слегка ею двигая, как делает настоящий дирижер.
- Глядя на Юми во время игры, я понял, что он очень плавный, - это не что-то вроде метронома, так как он действительно двигается и дает некие указания, и следовать за ним очень легко, - рассказал флейтист Андреа Гриминелли. Он играл свою сольную партию, стоя на сцене рядом с тенором Бочелли, когда тот исполнял Песенку Герцога со знаменитыми словами «Сердце красавицы склонно к измене» из оперы «Риголетто». Судя по тому, что многочисленная публика громко зааплодировала, ей выступление оркестра под руководством стоявшего на сцене робота, белый и гладкий корпус которого совершенно не вписывался в классический интерьер Театра Верди, очень понравилось. Всемирно известный тенор Андреа Бочелли, по приглашению которого YuMi и выступил в итальянской опере, ослеп в 12-летнем возрасте и потому не мог видеть мягких и выверенных движений автоматики. Тем не менее, он с большим интересом познакомился с Юми в кулуарах театра, и директор ABB Списшофер объяснил певцу некоторые особенности функционирования робота. Полное название Юми содержит знаменитый индекс IRB, из чего можно сделать вывод о том, что механический дирижер является дальним потомком того самого робота IRB6, который был создан в компании ASEA под руководством Бьёрна Вайшбродта.
«Мы очень счастливы оттого, что нам удалось внести вклад в некоторые успехи робототехники. И мне кажется, когда я смотрю на современные технические достижения, что даже спустя тридцать пять лет у нас все еще есть робот, являющийся конструкционной моделью для, в общем-то, всех конкурентов, выпускающих промышленные роботы сегодня. И это вселяет в нас огромный оптимизм при обдумывании следующих шагов»



 28.11.2017, 17:59
28.11.2017, 17:59

 Re: Создатель первого коммерческого электрического робота (Бьёрн Вайшбродт)
Re: Создатель первого коммерческого электрического робота (Бьёрн Вайшбродт)